Журнал «Травма» Том 15, №2, 2014
Вернуться к номеру
Особливості динамічніх характеристик статограм при фіксації суглобів нижньої кінцівки
Авторы: Тяжелов О.А., Карпінський М.Ю., Карпінська О.Д., Яремин С.Ю. - ДУ «Інститут патології хребта та суглобів ім. проф. М.І. Ситенка НАМН України», м. Харків; Вінницький національний медичний університет ім. М.І. Пирогова
Рубрики: Травматология и ортопедия
Разделы: Клинические исследования
Версия для печати
Розглянуто особливості динаміки часових рядів статограми людини при вертикальному стоянні в умовах почергової фіксації суглобів нижніх кінцівок. Доведено, що фіксація суглобів нижніх кінцівок впливає на характеристики тенденції статограми, такі як амплітуда, швидкість, частотна складова й просторова орієнтація. Одночасно статистично показана можливість використання запропонованого методу аналізу для оцінки стану опорно-рухової системи людини.
Рассмотрены особенности динамики временных рядов статограммы человека при вертикальном стоянии в условиях поочередной фиксации суставов нижних конечностей. Доказано, что фиксация суставов нижних конечностей влияет на характеристики тенденции статограммы, такие как амплитуда, скорость, частотная составляющая и пространственная ориентация. Одновременно статистически показана возможность использования предложенного метода анализа для оценки состояния опорно-двигательной системы человека.
The features of the dynamics of the time series of statogram of the human when standing upright in conditions of alternately locking joints of the lower extremities. It is proved that the fixation of the joints of the lower extremities has an impact on characteristics of statogram trend, such as amplitude, velocity, frequency content and spatial orientation. At the same time the possibility of using proposed analysis method for the assessment of the musculoskeletal system of the person is shown statistically.
Статья опубликована на с. 88-93
Стійкість людини в процесі підтримки вертикальної пози — складний багатоланковий рефлекторний процес. Утримання рівноваги — це динамічний феномен, що потребує безперервних рухів тіла, які, у свою чергу, є результатом взаємодії вестибулярного та зорового аналізаторів, суглобно-м’язової пропріорецепції вищих відділів центральної нервової системи, а також різних морфофункціональних утворювань. Тому координація вертикального положення тіла служить своєрідним індикатором здоров’я, стану функціонального розвитку організму, фізичної підготовленості людини.
Враховуючи складність точного кількісного, просторового та часового аналізу стійкості людини у завданій позі по переміщенню проекції тиску на площину опори, ми використовували методику зовнішніх «збурювальних» впливів для виявлення прихованих компенсаторних можливостей системи опори й рухомості людини. Зовнішні впливи моделювали накладанням додаткових зв’язків на рухомі вузли (суглоби), що, на нашу думку, буде вимагати увімкнення нових механізмів корекції положення тіла у просторі.
Матеріали та методи дослідження
Експериментальні дослідження проводили в лабораторії біомеханіки ДУ «ІПХС ім. проф. М.І. Ситенка НАМНУ» на пристрої «Статограф».
Для проведення експериментальних досліджень були обрані 17 волонтерів (студентів) віком від 19 до 21 року.
Всім волонтерам виконували стандартні статографічні дослідження за методикою «Визначення функціональної опороспроможності нижніх кінцівок» при двохопорному стоянні та з переважною опорою на кожну з кінцівок окремо. Кожному волонтеру виконували дослідження у 4 варіантах:
— звичайне дослідження без фіксації суглобів;
— дослідження з фіксованим правим гомілковостопним суглобом (ГСС);
— дослідження з фіксованим правим колінним суглобом (КС);
— дослідження з фіксованими кульшовими суглобами.
Для здійснення цього завдання були виготовлені спеціальні ортези, що обмежують рухомість суглобів.
У дослідженні аналізували первинний часовий ряд, тобто розгортку статограми у фронтальній та сагітальній площинах у часі.
Аналіз тенденції належить до динамічних параметрів. Тенденція сигналу стабілограми (Detrend) — напрямок руху зміни значень сигналу упродовж означеного часу. Інтерполяція сигналу може бути проведеною за лінійною (Linear (y = a0 + a1x), квадратичною (Quadratic — y = a0 + a1 x + a2 x2), кубічною (Cubic — y = a0 + a1 x + a2 x2+ + a3 x3), логаріфмичною (Logarithmic — y = a0 + a1 ln(x)), експоненціальною (Exponential — y = a0 + a1 exp(–x/a2)), ступеневою (Power — y = a0 + a1 xa2), гіперболічною (Hyperbolic — y = a0 + a1 a2 /a2 + x) моделями.
Аналіз тенденції проводили за допомогою програмного забезпечення Auto Signal v.1.6.
Результати дослідження та їх обговорення
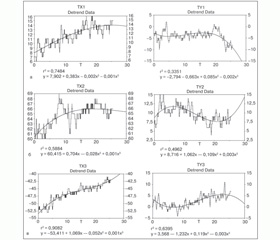
Було проведено статистичний підбір апроксимаційної кривої, модель якої описувала максимальну частку відліків сигналу статограми (r2). Результати аналізу наведені на рис. 1 — для статограм без фіксації, 2 — для статограм з фіксацією правого ГСС, 3 — для статограм з фіксацією правого КС, 4 — для фіксації кульшових суглобів.
/89/89.jpg)
При стоянні без фіксацій суглобів нижньої кінцівки (рис. 1) можна відмітити, що вертикальна поза підтримується без особливих навантажень. При двохопорному стоянні (рис. 1а) спостерігається плавний перехід тіла спочатку вправо, потім такий же перехід вліво.
Хитання у фронтальній площині (ось Х) має незначний розкид амплітудних значень — [–7,5; 7,5], всього 5–10 мм, причому симетричний. Хитання у сагітальній площині (ось Y) відмічається помірним збільшенням амплітуди хитання [10,0; 35,0] до 15–25 мм з нахилом тіла вперед наприкінці циклу дослідження.
Одноопорне стояння (рис. 1б, 1в) характеризується плавним хитанням як у фронтальній, так і в сагітальній площинах. На обох кінцівках амплітуди хитання практично однакові, хоча при опорі на праву кінцівку тіло волонтера прямує вперед, а при опорі на ліву кінцівку — помірно назад. Але якщо проаналізувати первинне положення ЗЦМ, то при опорі на праву кінцівку початкове положення ЗЦМ зміщено вперед — [–15,5; 15,0] і прямує вперед до [–5,0; 0], а при опорі на ліву — вперед [12,0; 15,0] і прямує назад [0; 10,0]. Отже, спостерігається плавне вирівнювання тіла до вертикального положення.
Взагалі відмічається особливість стояння без фіксації суглобів нижньої кінцівки, що хитання в боки незначне і не перевищує 10 мм, до того ж переважно симетричне. Хитання вперед–назад більш інтенсивне, має більшу амплітуду — до 10–15 мм і більшу частоту зміни напрямку.
Фіксація правого ГСС (рис. 2) значно змінила характер стояння волонтера. Так, при двохопорному стоянні (рис. 2а) амплітуда хитання у фронтальній площині збільшується до 15 мм, збільшується й інтенсивність зміни положення тіла, тобто період повертання у вихідну точку. В сагітальній площині також спостерігається збільшення амплітуди хитання до 20 мм, збільшується частота повертання у вихідну точку і помірне відхилення тіла вперед. Крім того спостерігається більш ламана крива стояння.
/90/90.jpg)
При опорі на кінцівку із зафіксованим ГСС (рис. 2б) спостерігається різка зміна кривої статограми у фронтальній площині. Крива набуває характеру гострих короткочасних імпульсів, спостерігається стрімкий, практично лінійний напрямок до повертання тіла у двохопорне стояння. Амплітуда хоча і невелика (не перевищує 10 мм), але частота помітно збільшується.
У сагітальній площині сигнал також наближається до високоамплітудних короткочасних імпульсів (до 25–30 мм). Центр ваги залишається в межах [–7,5; 17,5] упродовж усього дослідження.
При опорі на незафіксовану кінцівку (рис. 2в) статограма набуває властивостей звичайної, тобто спостерігається помірне, незначне хитання 5–7 мм і помірне вирівнювання тіла до вертикального двохопорного стояння. У сагітальній площині хитання не перевищують 5–10 мм, ЗЦМ залишається практично в одному положенні впродовж усього дослідження.
Аналіз тенденції показує, що повний цикл повертання у початковий стан ЗЦМ значно перевищує цикл дослідження. Напівперіод при двохопорному стоянні становить приблизно 20 с, при опорі на зафіксовану кінцівку важко визначити тенденцію до значень періоду, а при опорі на незафіксовану кінцівку можна приблизно за тенденцією розрахувати чверть періоду, який становить 20 с, тоді напівперіод — 40 с.
При двохопорному стоянні із зафіксованим правим колінним суглобом (рис. 3а) амплітуда хитання у фронтальній площині не перевищує 5–7 мм, але спостерігається зміщення ЗЦМ вправо, тобто в бік зафіксованої кінцівки. Амплітуда хитання в сагітальній площині збільшується до 20 мм і спостерігається помірна тенденція до переміщення ЗЦМ уперед.
/91/91.jpg)
При опорі на зафіксовану кінцівку (рис. 3б) статограма у фронтальній площині набуває вигляду короткочасних невеликих імпульсів з амплітудою від 2–3 до 5 мм. Але спостерігається зміщення тіла ще більше вправо. У сагітальній площині амплітуда збільшується до 15 мм. ЗЦМ у сагітальній площині має практично лінійну константну тенденцію, тобто ЗЦМ упродовж всього дослідження залишається в межах первинного положення.
При опорі на незафіксовану кінцівку (рис. 3в) спостерігається зменшення амплітуди хитання до 5 мм, але напрямок практично лінійної тенденції свідчить про напрямок тіла повернутися до двохопорного положення.
Аналіз тенденції показує, що є динаміка до повертання ЗЦМ у початкове положення, але цей час значно перевищує цикл дослідження. Аналіз тенденції може свідчити про те, що четверта частина періоду хитання становить приблизно 20 с при двохопорному стоянні і 25 с при опорі на зафіксовану кінцівку.
При фіксації кульшових суглобів (рис. 4) статограма при всіх типах стояння набуває вигляду низькоамплітудних (3–5 мм у фронтальній і 3–7 мм у сагітальній площинах), але дуже високочастотних імпульсів. Невеличкі хитання схожі на тремор. У фронтальній площині спостерігається односторонній нахил тіла (у нашому прикладі вправо).
/92/92.jpg)
У сагітальній площині положення тіла залишається в межах первинно прийнятого положення. При двохопорному стоянні спостерігається незначний нахил тіла назад зі збільшенням нахилу наприкінці цик–лу дослідження. При одноопорному стоянні нахил тіла переважно вперед, але подальшої зміни положення не відмічається.
Аналіз отриманих рівнянь показав, що динаміка підтримки рівноваги при вертикальному стоянні більш значуще описується кубічним рівнянням (y = a0 + a1 x + + a2 x2 + a3 x3), тобто тенденція розвитку динаміки передбачає наявність гіпонизькочастотної хвилі на проміжку часу дослідження. Але якщо не враховувати нелінійні складові рівняння з дуже маленькими (до 0,01) коефіцієнтами, то рівняння описують майже лінійний характер тенденції статограми. Такі рівняння, з малими коефіцієнтами при нелінійних складових, описують статограми двохопорного стояння при фіксації одного суглоба та статограми одноопорного стояння при опорі на фіксовану кінцівку.
Якщо враховувати правила теореми Такенса про обов’язкове повернення хвильового процесу у точку, що лежить на усередненому рівні хвилі, то можна говорити, що період хитання при фіксації суглобів нижніх кінцівок зростає в рази порівняно зі стоянням без фіксації суглобів. Якщо враховувати, що швидкість хитання людини залишається порівняно однаковою при всіх видах дослідження, то збільшення періоду хитання призводить до збільшення проекції плями статограми на площину опори.
Висновки
Характер статограми при незафіксованих суглобах нижньої кінцівки має плавний характер зміни положення ЗЦМ при підтримці рівноваги, може спостерігатися помірне відхилення тіла в один із боків для прийняття більш зручного стояння. При одноопорному рівні стояння частіше спостерігається помірне відхилення тіла в бік двохопорного стояння. Примусове виключення з механізму підтримки рівноваги одного з ланцюгів помітно змінює характеристики статограми.
При фіксації ГСС зменшується спроможність рухомості тіла для підтримки рівноваги, тобто спотворюється повноцінна компенсація рівноваги за рахунок гармонійного хитання. Вимушене зменшення спроможності компенсації через штучне обмеження рухів гомілки веде до збільшення кількості рухів, тобто збільшення частоти хитання. Рухи стають різкими, схожими на піки.
Фіксація КС при одноопорному стоянні веде до збільшення амплітуди хитання, що можна пояснити включенням до підтримки рівноваги ГСС цієї кінцівки, але збільшення довжини важеля, який треба урівноважити ГСС. На фоні дрібних пікоподібних рухів спостерігається широка хвиля хитання, яка характеризує процес підтримки рівноваги.
Фіксація кульшових суглобів призводить до виключення з механізму підтримки рівноваги найбільшого і найрухомішого суглоба. Крім того, збільшення важеля (а в нашому випадку — двох важелів) потребує значного розхитування тіла для підтримки рівноваги. Одноопорне стояння при зафіксованому кульшовому суглобі потребує значних зусиль, і тому на фоні дрібних пікоподібних високочастотних рухів спостерігається дуже велика хвиля відхилення тіла для підтримки рівноваги. Можливо, ця хвиля має період повертання в початкове положення такий, що значно перевищує час дослідження.
Таким чином, чим більший важіль, виключений із ланцюга підтримки рівноваги, треба компенсувати при підтримці рівноваги, тим більше часу потрібно на компенсацію рівноваги, тобто тим більший період повертання до початкового стану системи.
Значне збільшення площі плями проекції центру мас на площину опори може бути ознакою патологічного процесу у суглобах нижніх кінцівок.
1. Auto Signal. Pioneering automated signal analysisand advanced filtering. — Users Guide, USA, 2003.
2. Takens F. Lecture Notesin Mathematics / Ed by Rand D.A., Young L.S. — Berlin: Springer-Verlag, 1981. — Vol. 989.