Журнал «Травма» Том 15, №6, 2014
Вернуться к номеру
Біомеханічне обгрунтування клінічного застосування універсального апарата з адаптацією форми опор до анатомічної конфігурації сегмента кінцівки
Авторы: Гуцуляк В.І., Сулима В.С. — Івано-Франківський національний медичний університет; Шібель І.В. — МКЛ № 1, м. Івано-Франківськ
Рубрики: Травматология и ортопедия
Разделы: Клинические исследования
Версия для печати
Авторами проведено тривимірне комп’ютерне моделювання біомеханічних систем двох моделей: І — «великогомілкова кістка — апарат Г.А. Ілізарова з ексцентричним розташуванням опор»; ІІ — «великогомілкова кістка — універсальний апарат з адаптацією форми до конфігурації сегмента» в програмі Autodesk Inventor 11 з використанням методу кінцевих елементів.
Основним завданням було визначення величини навантажень в різних напрямках, при яких відбувається критичне зміщення фрагмента на 1 мм.
Згідно з отриманими результатами зміщення дистального фрагмента на 1 мм у ІІ моделі відбувається при прикладанні сили навантаження вздовж осі Y величиною в 1194 Н, вздовж осі Х — 495 Н, вздовж осі Z — 465 Н та моменту сили відносно осі Y 215 Н•м, що порівняно з І моделлю більше відповідно на 55,47 (768 Н), 15,65 (428 Н), 12,05 (415 Н) та 26,47 % (170 Н•м).
У двох моделях жорсткість фіксації фрагментів є адекватною для забезпечення можливості одноопорного стояння на травмованій кінцівці. З двох вищенаведених біомеханічних систем конструкція універсального апарата для черезкісткового остеосинтезу (ІІ модель) завдяки можливості адаптації форми опор до анатомічної конфігурації сегмента забезпечує достатній запас жорсткості для раннього осьового навантаження травмованої кінцівки під час ходьби, що, очевидно, дозволить оптимізувати терміни та анатомо-функціональні результати лікування хворих з переломами кісток гомілки.
Авторами проведено трехмерное компьютерное моделирование биомеханических систем двух моделей: I — «большеберцовая кость — аппарат Г.А. Илизарова с эксцентрическим расположением опор»; II — «большеберцовая кость — универсальный аппарат с адаптацией формы к конфигурации сегмента» в программе Autodesk Inventor 11 с использованием метода конечных элементов
Основной задачей было определение величины нагрузок в различных направлениях, при которых происходит критическое смещение фрагмента на 1 мм.
Согласно полученным результатам смещение дистального фрагмента на 1 мм во II модели происходит при приложении силы нагрузки вдоль оси Y величиной 1194 Н, вдоль оси Х — 495 Н, вдоль оси Z — 465 Н и момента силы относительно оси Y 215 Н•м, что в сравнении с І моделью больше соответственно на 55,47 (768 Н), 15,65 (428 Н), 12,05 (415 Н) и 26,47 % (170 Н•м).
В двух моделях жесткость фиксации фрагментов является адекватной для обеспечения возможности одноопорного стояния на травмированной конечности. Из двух вышепредставленных биомеханических систем конструкция универсального аппарата для чрескостного остеосинтеза (II модель) благодаря возможности адаптации формы опор к анатомической конфигурации сегмента обеспечивает достаточный запас жесткости для ранней осевой нагрузки травмированной конечности во время ходьбы, что, очевидно, позволит оптимизировать сроки и анатомо-функциональные результаты лечения больных с переломами костей голени.
The authors have carried out three-dimensional computer simulation of biomechanical systems of two models: I — «tibia — G.A. Ilizarov’s device with eccentric location of supports»; II — «tibia — universal device with shape, adapting to configuration of a segment» in Autodesk Inventor 11 program using finite element method.
The main objective was determining the load in various directions, characterized by 1-mm shift of the fragment, which is considered critical.
According to the findings, 1-mm shift of the distal fragment in II model occurs, when the loading, applied along the Y-axis, is 1194 N, along the X-axis — 495 N, along the Z-axis — 465 N and the moment of force along the Y-axis — 215 N•m, which in comparison with I model is higher by 55.47 (768 N), 15.65 (428 N), 12.05 (415 N) and 26.47 % (170 N•m), respectively.
In two models stiffness of fragments fixation is adequate to enable single-leg standing on the injured limb. Of the two above presented biomechanical systems, the design of the universal device for transosseous osteosynthesis (II model), owing to possibility of adaption of supports shape to anatomical configuration of a segment, provides adequate margin of stiffness for early axial loading to a damaged limb during the walk, thus obviously allowing to optimize the duration and anatomic-functional outcomes of treatment of patients with tibial fractures.
апарат зовнішньої фіксації, тривимірна модель, метод кінцевих елементів, жорсткість фіксації.
аппарат внешней фиксации, трехмерная модель, метод конечных элементов, жесткость фиксации.
external fixation device, three-dimensional model, finite element method, fixation stiffness.
Статья опубликована на с. 65-71
Вступ
Адекватність вибору методу фіксації перелому суттєво залежить від розуміння біомеханічних аспектів впливу засобів остеосинтезу на репаративну регенерацію кістки. Актуальною та недостатньо вивченою проблемою ортопедії та травматології залишається біомеханіка остеосинтезу. Визначальним критерієм здатності фіксатора протидіяти зовнішнім зусиллям при виконанні стабільно-функціонального остеосинтезу є жорсткість фіксації фрагментів. Сучасні наукові дослідження спрямовані на пошук шляхів оптимізації взаємовпливу біомеханічної системи «фіксатор — кістка» в умовах перелому [1, 11].
Відомо, що надмірна рухомість в місці дотику кісткових фрагментів сповільнює процес формування кісткового зрощення [7]. Тому основним завданням черезкісткового компресійного остеосинтезу є створення оптимальної стабільної фіксації кісткових відламків, що створює сприятливі механічні умови для процесу консолідації [9].
На стабільність апарата зовнішньої фіксації (АЗФ) суттєво впливає діаметр опор. Зменшення відстані між точками фіксації спиці збільшує загальну жорсткість конструкції [3, 11]. Аналогічна тенденція властива всім системам зовнішніх фіксаторів. Чим ближче компоненти рами апарата розташовані до кістки, тим вища стабільність конструкції [8, 12].
Отже, одним із шляхів покращення біомеханічної взаємодії при черезкістковому остеосинтезі є оптимізація геометрії зовнішніх опор. Конструкція більшості відомих апаратів зовнішньої фіксації передбачає використання кільцевих опор. В клінічній практиці також використовують фіксуючі апарати з овальними, квадратними, шестикутними та іншими формами опор [3, 6]. Пошук авторами оптимальної форми опори АЗФ зумовлений недоліками кільцевих опор, форма яких не відповідає анатомічній формі сегмента кінцівки, іншим біомеханічним вимогам.
Мета роботи: біомеханічно обґрунтувати доцільність клінічного застосування універсального апарата з адаптацією форми опор до анатомічної конфігурації сегмента травмованої кінцівки.
Матеріал і методи
Для порівняльного віртуального біомеханічного математичного дослідження в програмі Autodesk Inventor 11 створені дві тривимірні геометричні моделі: І — «гомілка — апарат Г.А. Ілізарова з ексцентричним розташуванням опор» (рис. 1а); ІІ — «гомілка — універсальний апарат з адаптацією форми опор до конфігурації сегмента кінцівки» (рис. 1б).
/66/66.jpg)
Модель сегмента гомілки створена на основі томографічних зрізів, проведених через 0,5–1 см. При підрахунках звертали увагу також на структуру біологічних тканин: компактна і губчаста кістка, хрящова тканина. При визначенні властивостей кісткових структур матеріал вважали однорідним та ізотропним. Механічні характеристики матеріалів наведені в табл. 1.
/66/66_2.jpg)
Окремі складові апаратів розташовували відповідно до методу дослідження черезкісткових модулів [1, 6]. Апарат, що фіксує два фрагменти, позначається як модуль третього порядку (М3).
Компонування апарата обрано за типом М3к = М2к + М2к, де М2к і М3к — це комбіновані модулі другого і третього порядку, які передбачають використання спиць та стрижнів як черезкісткових елементів комбінації. Апарат складали з чотирьох опор, у двох з яких фіксували проксимальний фрагмент, а в двох інших — дистальний. За допомогою робочих площин сегмент умовно поділили на вісім рівнів. Моделювання поперечного перелому великогомілкової кістки провели на V рівні, відповідно на ІV і VІ рівнях розташовані опори з замкнутим контуром, а на ІІІ та VІІ рівнях — опори секторного типу. У двох центральних опорах, що виконані з замкнутим контуром, як черезкістковi елементи використовували по дві спиці діаметром 2,2 мм. У двох опорах секторного типу, що знаходяться на віддалі від перелому, — по два стрижні Шанца діаметром 6 мм. Особливістю взаємного розташування двох спиць в кожній опорі було їх проведення на відстані, що відповідає товщині опори і цим забезпечує відсутність їх прогинання при натягуванні та рівномірний розподіл навантаження між ними. Спиці в опорах проводили під кутом 60° одна до одної. Як відомо, при кутах перехресту спиць від 0 до 60° сила їх натягу зменшується, а від 60 до 90° — зростає [8].
З метою вивчення жорсткості фіксації фрагментів вищенаведені геометричні моделі після інактивації м’якотканинних структур експортували в програмний модуль Stress Analysis, в якому їх перевели в кінцево-елементні моделі. Як основний елемент використовували тетраедр. Усі розрахунки проводили за загальними схемами фіксації та навантаження змодельованих систем для можливості виконання порівняльного аналізу різних систем зовнішньої фіксації [6]. Закріплення великогомілкової кістки проводили на торцевій поверхні епіфіза проксимального фрагмента.
Основним завданням дослідження було визначення навантаження в різних напрямках, при якому відбувається зміщення дистального фрагмента на 1 мм, що вважається несприятливим критичним для формування первинного зрощення [1, 6]. Вектори навантажень прикладали до дистального фрагмента кістки в шести стандартних ступенях свободи [2, 4]. При визначенні результатів переміщень похибка становила ±0,025 мм.
Результати та їх обговорення
При створенні кінцево-елементної сітки для І моделі кількість елементів становила 400 350, кількість вузлів — 671 393; для ІІ моделі — дещо більше, відповідно — 408 190 та 688 631.
Результати числових розрахунків при прикладанні навантажень, що призводять до критичного зміщення дистального фрагмента в площині перелому, зведені в табл. 2.
/67/67.jpg)
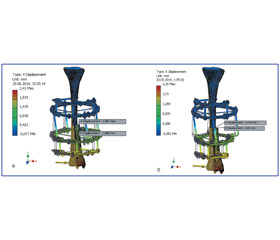
При дослідженні поздовжньої жорсткості для обох моделей властиві найвищі показники (табл. 2). Так, зміщення дистального фрагмента на 1 мм у ІІ моделі відбувається при прикладанні компресійного навантаження (вздовж осі Y) величиною в 1194 Н, що на 55,47 % перевищує показники І моделі (768 Н). Розподіл переміщень в системах «кістка — фіксатор» наведений на рис. 2, стрілкою вказано вектор навантаження (за віссю сегмента), зміщення зображено схематично подвоєнням контурів кісток та елементів конструкції. На виносній кольоровій шкалі позначено числовий градієнт зміщення. Ділянка моделі, що залишається без зміщення, зображена зеленим кольором. Ділянка, що зміщується зі знаком «+», — червоним, зі знаком «–» — синім. На виносках вказано максимальне та мінімальне зміщення дистального фрагмента в площині перелому.
/67/67_2.jpg)
При дослідженні поперечної жорсткості вздовж осі Х (рис. 3, 4) зміщення дистального фрагмента на 1 мм в ІІ моделі відбувається при моделюванні приведення та відведення (у фронтальній площині) при навантаженні величиною в 495 Н, що порівняно з І моделлю (428 Н) більше на 15,65 %.
/68/68.jpg)
При дослідженні поперечної жорсткості у сагітальній площині (вздовж осі Z) (рис. 5, 6) зміщення дистального фрагмента на 1 мм в ІІ моделі відбувається при моделюванні згинання і розгинання при навантаженні величиною в 465 Н, що порівняно з І моделлю (415 Н) більше на 12,05 %.
/69/69.jpg)
Поперечна жорсткість фіксації фрагментів у фронтальній площині в обох моделях (428 та 495 Н) вища, ніж у сагітальній площині (415 та 465 Н), що зумовлено особливістю розташування черезкісткових елементів, які проведені з тупим (120°) відкритим допереду кутом перехресту.
При дослідженні ротаційної жорсткості (рис. 7, 8) зміщення дистального фрагменту на 1 мм в ІІ моделі відбувається при прикладанні моменту сили за віссю Х величиною 215 Н•м, що порівняно з І моделлю більше на 26,47 % (170 Н•м).
Проведені біомеханічні дослідження виявили, що при прикладанні зміщуючих зусиль на стиснення, згин та кручення універсальний апарат для черезкісткового остеосинтезу [5] завдяки більш ефективній геометрії опор забезпечує більшу жорсткість фіксації фрагментів порівняно з апаратом Г.А. Ілізарова. Це, власне, і доводить можливість клінічного застосування розробленого апарата для лікування хворих з переломами кісток не тільки гомілки, але й інших сегментів.
З клінічного огляду для відновлення опірної здатності кінцівки вагомою є здатність конструкції забезпечити стабільність фіксації фрагментів при їх осьовому навантаженні під час одноопорного стояння та ходьби.
Виходячи з того, що сила F = mg (m — маса тіла, g — прискорення вільного падіння, що становить 9,80665 м/с2), то для людини з середньою масою тіла (70 кг) сила осьового навантаження під час опори на одну кінцівку становить: F = 70 кг • 9,80665 м/с2 = 686,466 Н.
Враховуючи, що коефіцієнт жорсткості (К) при моделюванні компресії для I досліджуваної моделі становить КІ/ компрес = 768 Н/мм, а для II моделі— КІІ/ компрес = 1194 Н/мм, то в обох моделях жорсткість фіксації фрагментів є адекватною для забезпечення можливості одноопорного стояння на травмованій кінцівці.
Відомо, що навантаження на одну кінцівку під час ходьби становить 120–130 % від маси тіла [10]. Для людини з середньою масою тіла сила навантаження на одну кінцівку під час ходьби становить: F = 70 кг 9,80665 м/с2 • 1,3 = 892,405 Н.
Отже, з двох вищенаведених біомеханічних систем тільки конструкція АЗФ ІІ моделі забезпечує достатній запас жорсткості (1194 Н) для раннього повноцінного навантаження травмованої кінцівки під час ходьби.
В розробленому універсальному апараті (II модель) адекватна жорсткість конструкції досягається завдяки адаптації розмірів та форми опор до анатомічної конфігурації сегмента. Це дозволяє наблизити точки фіксації черезкісткових елементів та, відповідно, зменшити плечі їх навантаження в конструкції. А це, у свою чергу, забезпечує можливість раннього навантаження травмованої кінцівки.
Подальші наукові дослідження повинні бути спрямовані на удосконалення конструкційних властивостей АЗФ та використання нових композитних матеріалів для їх виготовлення.
Висновки
Порівнюючи жорсткість фіксації фрагментів великогомілкової кістки при використаннi обох моделей (I і II), ми виявили оптимальні показники для забезпечення можливості одноопорного стояння на травмованій кінцівці.
В універсальному апараті для черезкісткового остеосинтезу (II модель) завдяки можливості адаптації форми опор до анатомічної конфігурації сегмента жорсткість фіксації фрагментів порівняно з апаратом Г.А. Ілізарова (I модель) вища на 55,47 % при прикладанні компресійних, на 12,05–15,65 % — поперечних та на 26,47 % — ротаційних зміщуючих зусиль. Це забезпечує можливість не тільки одноопорного стояння, але й проведення раннього навантаження пошкодженої кінцівки під час ходьби, що, очевидно, дозволить оптимізувати терміни консолідації та анатомо-функціональні результати лікування хворих із переломами кісток гомілки.
1. Бушманов А.В. Методика имитационного моделирования механического поведения фиксирующих устройств в травматологии / А.В. Бушманов // Вестник ТОГУ. — 2009. — № 4 (15). — С. 61-69.
2. Бушманов А.В. Система имитационного моделирования фиксирующих конструкций в травматологии / А.В. Бушманов // Медицинская информатика. — 2010. — № 1 (23). — С. 43-49.
3. Ли А.Д. Руководство по чрескостному компресионно-дистракционному остеосинтезу / А.Д. Ли, Р.С. Баширов. — Томск: Красное знамя, 2002. — 307 с.
4. Математичне моделювання діафізарних деформацій довгих кісток / О.А. Тяжелов, Н.Ю. Полєтаєва, К.К. Романенко [и др.] // Ортопедия, травматология и протезирование. — 2010. — № 3. — С. 61-63.
5. Пат. № 99872 Україна, МПК А61В 17/58. Універсальний апарат для черезкісткового остеосинтезу / В.І. Гуцуляк (Україна) — а 2011 01932; Заяв. 18.02.2011; Опубл. 10.10.2012. Бюл. № 19.
6. Соломин Л.Н. Основы чрескостного остеосинтеза аппаратом Г.А. Илизарова / Л.Н. Соломин. — СПб.: Морсар АВ, 2005. — 544 с.
7. Стецула В.И. Чрескостный остеосинтез в травматологии / В.И. Стецула, А.А. Девятов. — К.: Здоров’я, 1987. — 200 с.
8. Шевцов В.И. Аппарат Илизарова. Биомеханика / В.И. Шевцов, В.А. Немков, Л.B. Скляр. — Курган: Периодика, 1995. — 165 с.
9. Шевцов В.И. Дефекты костей конечностей. Чрескостный остеосинтез по методикам Российского научного центра «ВТО» им. академика Г.А. Илизарова / В.И. Шевцов, В.Д. Макушин, Л.М. Куфтырев — М.: Зауралье, 1996. — 504 с.
10. Янсон Х.А. Биомеханика нижних конечностей человека / Х.А. Янсон. — Рига: Зинатне, 1975. — 324 с.
11. Fragomen A.T. The mechanics of external fixation / A.T. Fragomen, S.R. Rozbruch // HSS J. — 2007. — Vol. 3(1). — P. 13-29. doi: 10.1007/s11420-006-9025-0.
12. Grivas T.B. The use of twin-ring Ilizarov external fixator constructs: application and biomechanical proof-of principle with possible clinical indications / T.B. Grivas, E.A. Magnissalis // J. Orthop. Surg. Res. — 2011. — Vol. 6. — P. 41. doi: 10.1186/1749-799X-6-41.